修正零件圖、在coppeliasim進行模擬並修正錯誤、準備pdf、製作reavel並分配上台報告內容
繪圖更改、Heroku協統
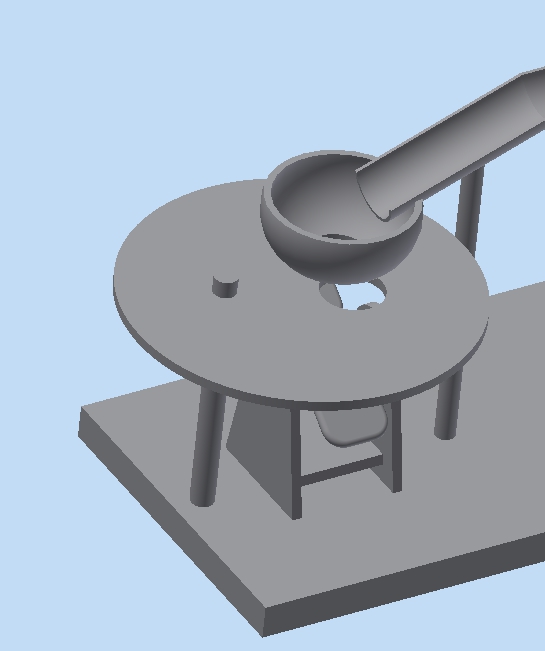
經W7coppeliasim進行模擬後發現轉盤太小會造成球一樣滾動因此將圓盤直徑加大
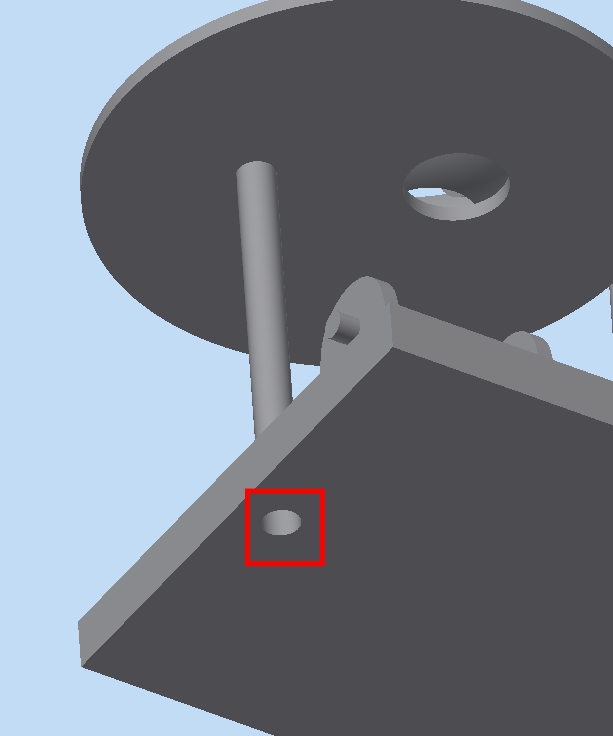
模擬後發現須將底座挖圓盤軸的洞,不然組合圖放入coppeliasim時會自動視為一體,會導致無法驅動
Copyright © All rights reserved | This template is made with by Colorlib