預定進度:繪製零件圖、在coppeliasim進行模擬並修正錯誤
40823102負責繪圖
40823106負責簡報製作
40823121負責CoppeliaSim的模擬
40823135負責PDF製作及報告
骨架、球軌
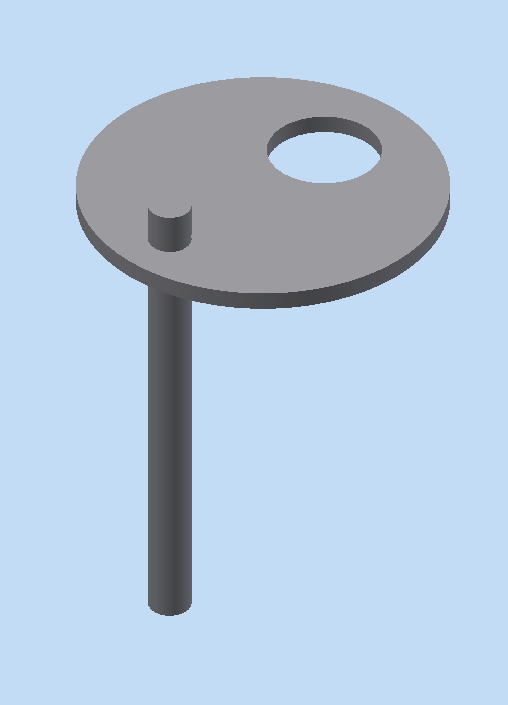
轉盤及支撐軸,透過轉盤週期作旋轉動作讓球也成週期落下
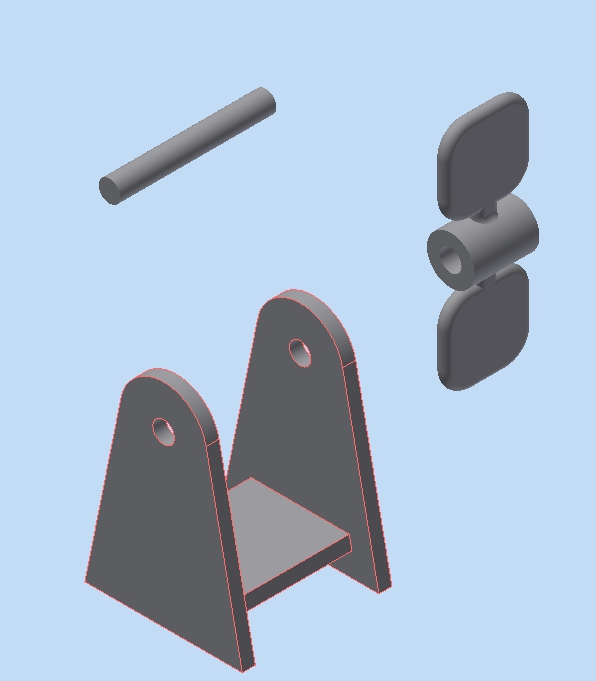
發球器的軸、底座、擊球的轉臂
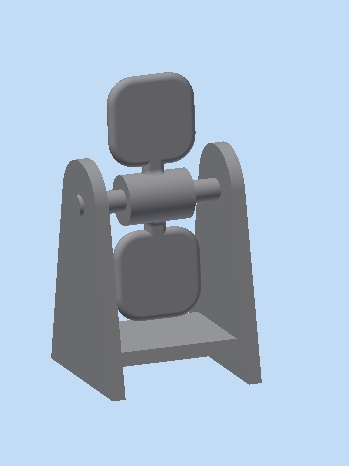
發球器組合圖
發球器做動
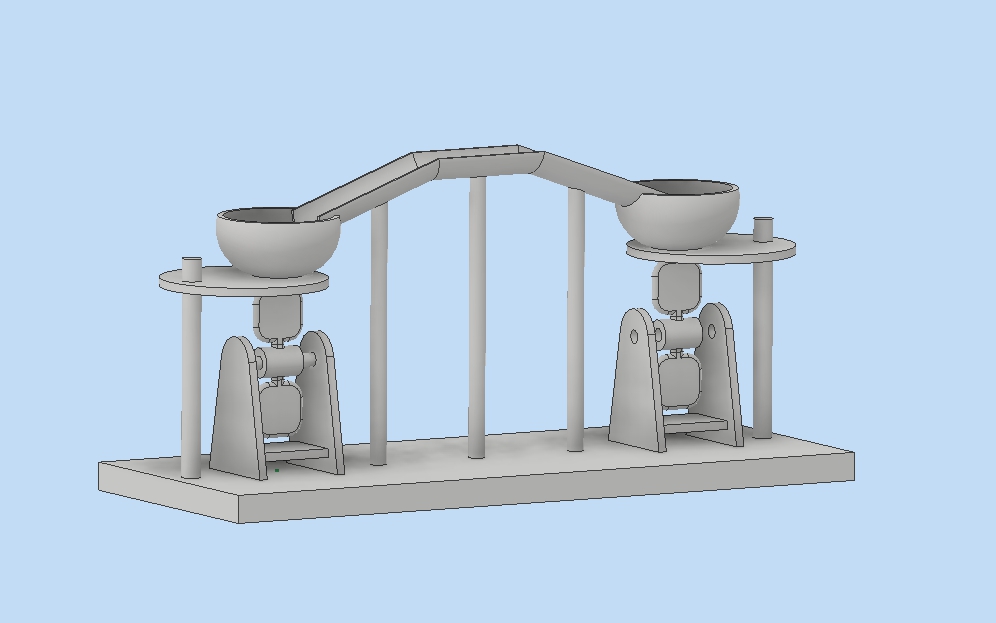
整體組合圖
Copyright © All rights reserved | This template is made with by Colorlib
.jpg)